Posts
-

Connecting an Amiga mouse to a classic Macintosh
March 25, 2025
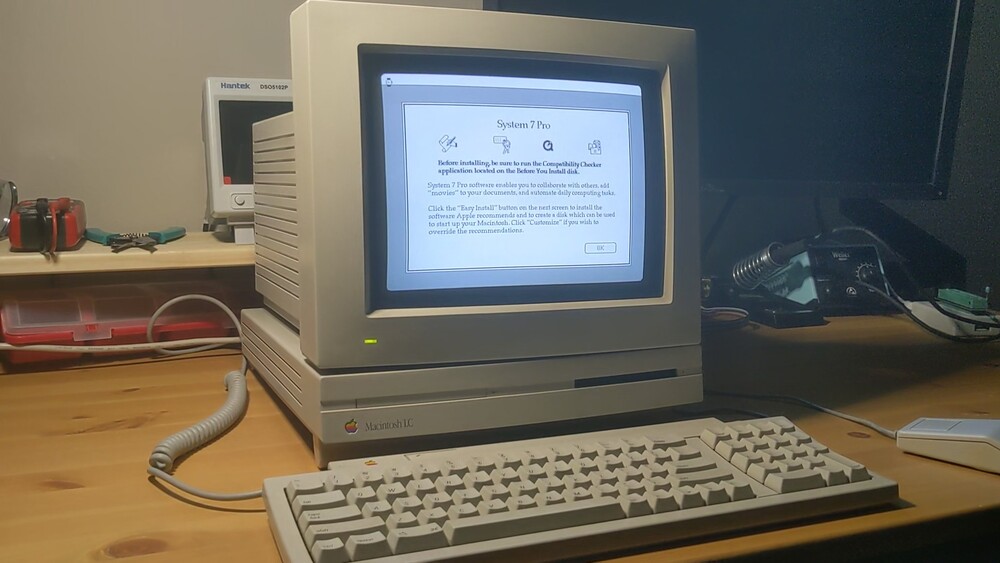
I find myself without a classic Apple M0100 mouse for my Macintosh 512K Enhanced, which sure makes it hard to test out some repairs. While I work out how to get one in reasonable shape for a reasonable amount of money, I still needed something to…
-

How to dumpster dive for CRT monitors
November 21, 2022
I have started to pull together a few different sources online for 15 KHz capable CRT monitors, mostly to support this awful Amiga habit I've formed. This would also be useful if someone was searching for Atari ST monitors, Amiga monitors, or even…
-

Basement dwelling Commodore SuperPET SP9000
August 30, 2022
The Commodore SuperPET (or MMF - Micro Main Frame in Europe) was an enhanced 8032 designed by the University of Waterloo for programming education, and then sold retail. It added a second CPU, the Motorola 6809, as well as a total of 96k of RAM to…
-
A Macintosh LC Out of the Spotlight
March 4, 2022
The Macintosh LC was a mid-range computer released in 1990, as part of a trio of new Macs (including the Classic and IIsi) allowing Apple to target a more cost-sensitive user. At $2,499, it was the lowest cost colour Macintosh released at that time.…
-

Varta'd by the Amiga 4000
February 2, 2022
In very early 2021, really bored by the pandemic, I was on the lookout for busted Commodore and Amiga machines. Someone reached out with an Amiga 4000 they had available. They had no way to test it, all of the cables and accessories were missing,…
-

The Ongoing Saga of this Commodore B128 (4/4)
January 21, 2022
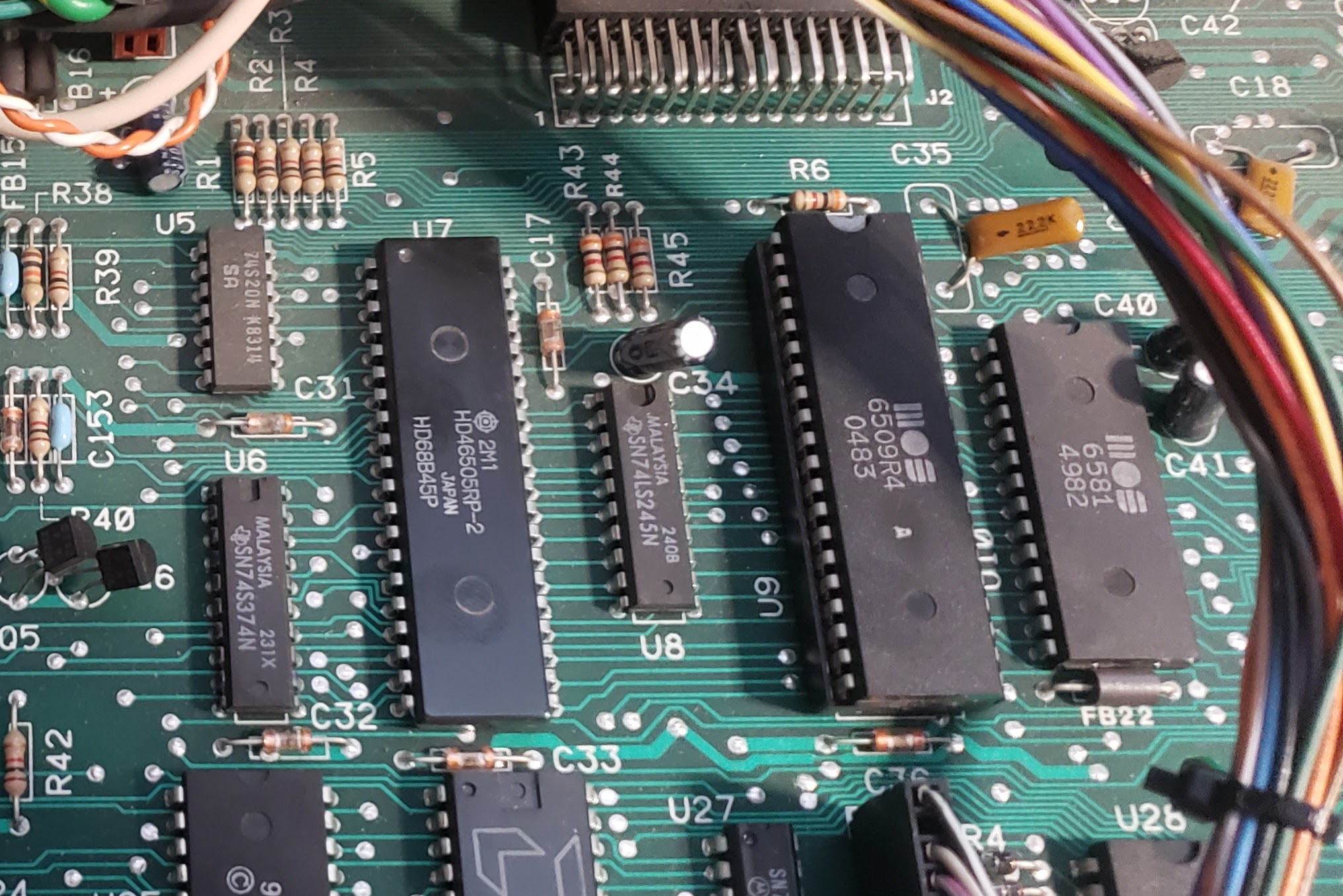
In the last post , I found out my MOS 6509 was garbage, at the very least, and was waiting on an order of a Nu6509 from RETRO Innovations . There were some delays in receiving PCBs and getting them soldered up, but it finally arrived a couple of…
-
A Forgotten Amiga 500
December 27, 2021
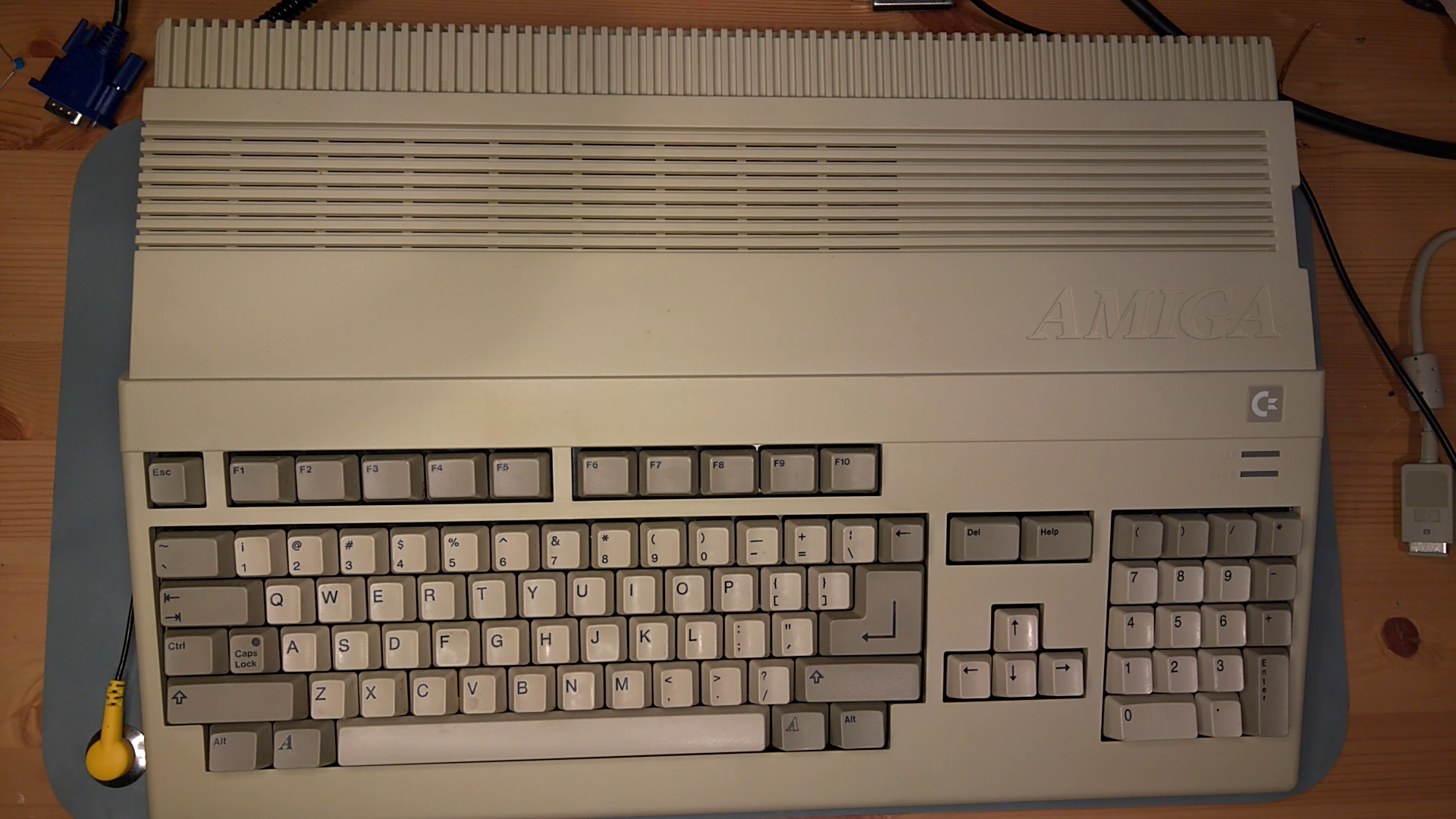
I came across a pretty nice condition, but broken, Commodore Amiga 500. The Amiga 500 was a cost reduced, mass market successor to the Amiga 1000, wrapped in a wonderful case with a built-in keyboard, side expansion, and a floppy drive. It didn't…
-
A Surprisingly Annoying Amiga 3000
December 20, 2021
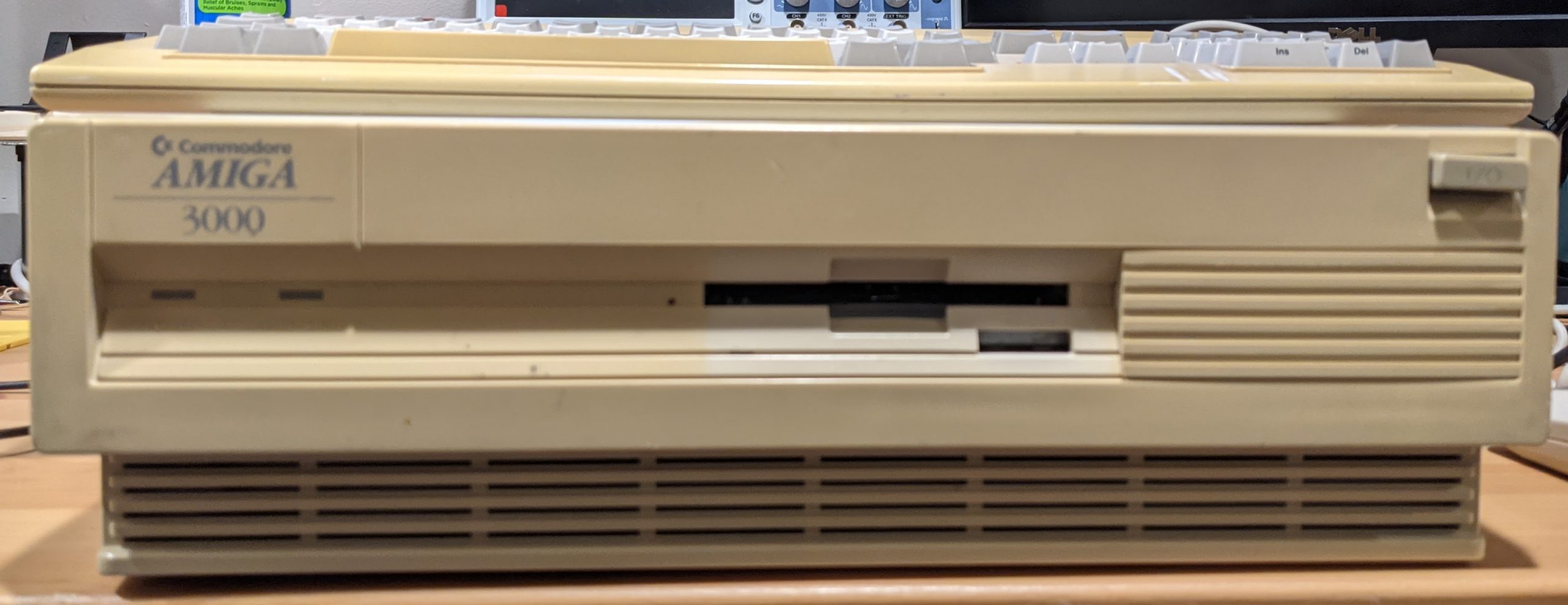
The Amiga 3000 was a high-end Amiga released in 1990, with a redesigned case, a 68030 processor, up to 16mb of RAM on board, and built-in SCSI support. They didn't sell incredibly well, and at least for me, were remarkably hard to find. Naturally, I…
-
What if I replaced Google Photos? (1/x)
September 10, 2021
Years and years ago, as I started using operating systems besides Mac OS X full time, I decided to let go of iPhoto and start doing my photo management elsewhere. I ended up on Google Photos for a few big reasons. One, the launch photo editing was…
-
The Ongoing Saga of this Commodore B128 (3/4)
March 15, 2021
In the last post , I ended up desoldering some components that I thought could be a problem, only to find that they appear to be just fine . I moved on to second guess my assumptions due to my experience level, specifically wondering about whether…
-
The Ongoing Saga of this Commodore B128 (2/4)
March 2, 2021
In the last post , I introduced my US-market Commodore B128 that wasn't feeling like being a computer. A lot of the diagnostics looked okay, and I was just about to start desoldering components out of a combination of hope and despair. Some…
-

The Ongoing Saga of this Commodore B128 (1/4)
February 26, 2021
This is my Commodore B128, serial C002720. The B128 is the low-profile US version of the Commodore CBM-II, a machine designed to replace the PET/CBM series, released around the same time as the Commodore 64. Other pages, linked below, do a great job…
-
Sharing your WSL2 environment with Linux
July 7, 2020
It seems like I'm in a constant state of switching between Windows 10 and Linux on my personal laptop, so I keep both environments available in a dual boot. I've really enjoyed using WSL2 on my Windows 10 side, so much so that I have a bunch of…
-
Adventures in running an AMI locally
June 22, 2020
I recently had to do some spelunking into a long-updated AMI image to move it over to automated builds. The AMI had been updated over the period of a few years with security updates, OS patches, configurations, and more, and very little…
-
MMI 3G+ Upgrade on a 2010 Audi A5 Cabriolet
September 25, 2019
Completed Facelift MMI 3G+ Installation I recently completed an infotainment upgrade on my B8 Audi A5 Cabriolet 2.0T Prestige, bringing it from the stock MMI 3G system to MMI 3G Plus. The updated MMI unit brings an updated interface, speed increase,…
-
Installing ChromeOS on Surface Go
February 17, 2019
Note : Hi from the past, everyone! This post is likely very out of date. There are new tools to replace Project Croissant, and new driver packs available for Surface products including the Go. This hasn't been updated since February of 2019. I'm a…
-
Migration and Merging
January 23, 2019
Hey, welcome to the new nicholasmelnick.com, largely the same as the old nicholasmelnick.com. Given that the Ambition Framework has gone to sleep, and I've largely stopped hobby development on Vala, it was about time that I both migrate my blog away…
-

Bigger than double DIN
December 10, 2016
A bigger write up later, but I had to share. This is a "double DIN" bezel/console -- actually, VW Golf sized -- from tt8n.de installed in a 2002 Audi TT, with a Joying JY-VL130 VW-focused Android-based head unit.
-
Random thoughts
December 8, 2016
Every day that I take off the engine cover and oil hasn't exploded everywhere is a good day.
-
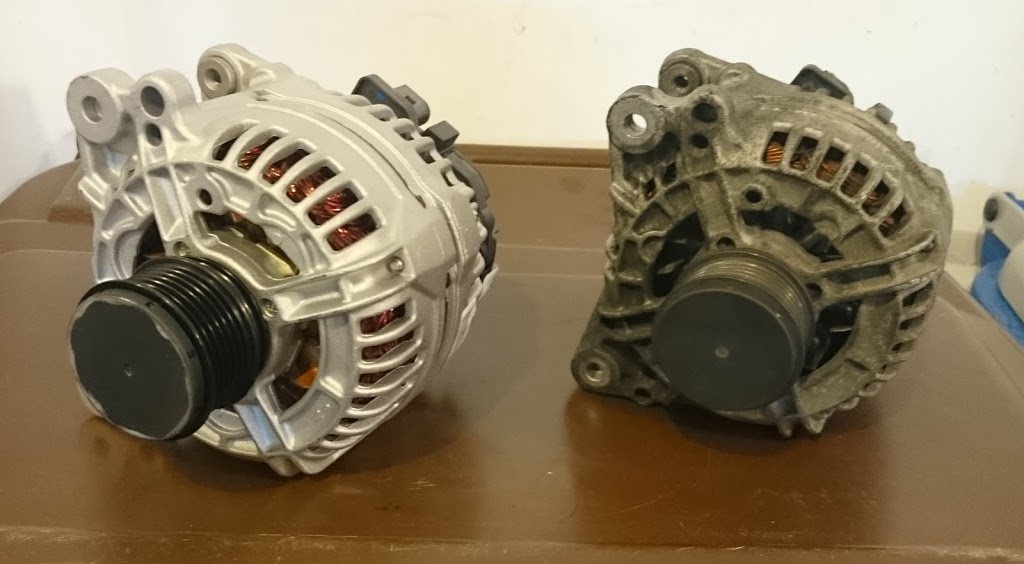
New Alternator
October 21, 2016
I had no idea alternators were so heavy. Dense little bastards, aren't they? Alternator change was mostly uneventful, except inconveniently placed -- like everything else in this car. I followed this guide to get down in there. It was mostly…
-
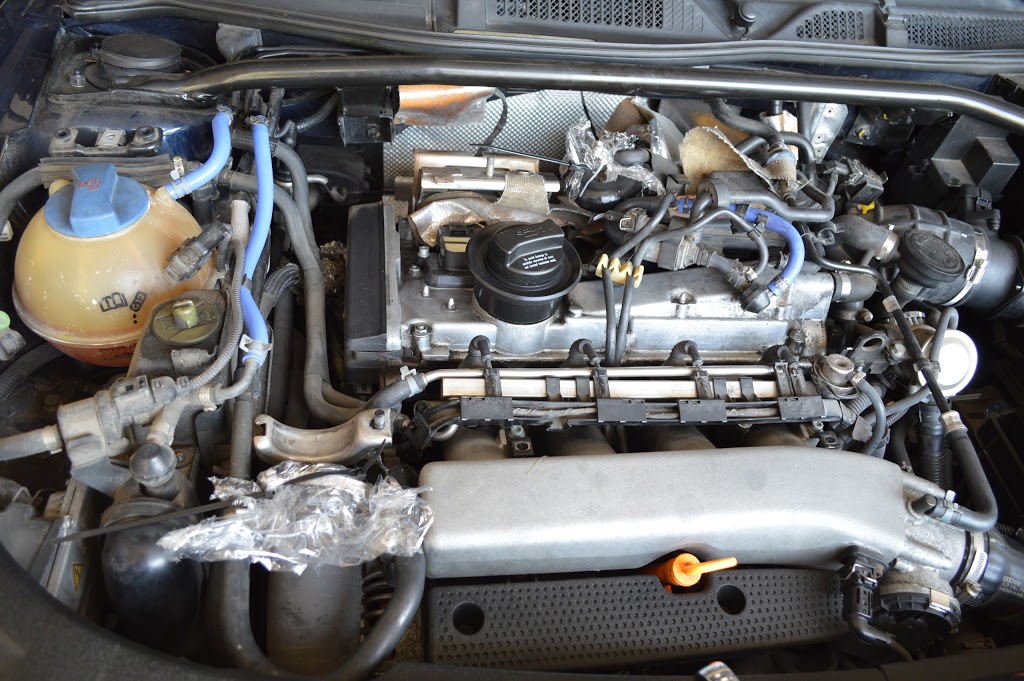
Timing Belt Service
October 13, 2016
After 3 years of ownership, finally had to do some real work on the TT, and when it rains, it pours -- but more on that later. This Audi TT has one of the VW/Audi 1.8T variants, which means it uses a timing belt, and the replacement interval on…
-

New V6 rear valance!
June 27, 2016
In non-mechanical repairs, finally had a chance to replace two issues on my vehicle, and one looks pretty awesome. First one was replacing the passenger side lower grille, where most cars would have a fog light. It was missing, and there was just…
-
Adventures in "Going Elsewhere"
May 19, 2016
Just had to share. I purchased the TT nearly three years ago, shortly after my son was born. Since then, it has gone to an actual shop once, and that was to do an oil change as we were mid move, and I didn't have any of my stuff. When I bought it,…
-

New intake
May 13, 2016
A little over a year ago, I decided it'd be neat to replace the intake on the TT, and while research brought me to the Modshack VTDA, they didn't sell it anymore. I did find a K&N unit for a price I could afford, and made the switch. It…
-
Shopping for Cars
March 31, 2016
My current car, a 2013 Chrysler 200 Limited, is under a lease that will be up in June. I loved this car far more than I expected to, given the reviews on it, but I can provide more color to that later. The end story is that the residual value of my…
-
Log4Vala - A logging framework for Vala inspired by Log4J
June 19, 2014
It's getting pretty easy to see that I should start finishing some entries for this blog if it's going to be at all relevant or useful, but I'll take a moment to introduce another "thing". This past weekend, while working on a web project…
-
Project Audi TT Audio: Head Unit
April 6, 2014
I always felt that the head unit was the easiest component of most vehicles to replace. Modern vehicles have hugely custom setups, some controlling HVAC and car preferences, which makes it a pain. Luckily, in this case, the only sin is that Audi…
-
Project Audi TT Audio
March 29, 2014
So, last fall, I picked up a 2002 Audi TT 225 Roadster with a little over 160,000 miles. It's super high mileage, but drives super well, and I figure it's a great little car to learn on. Luckily, nothing terrible has happened yet, but I can…
-
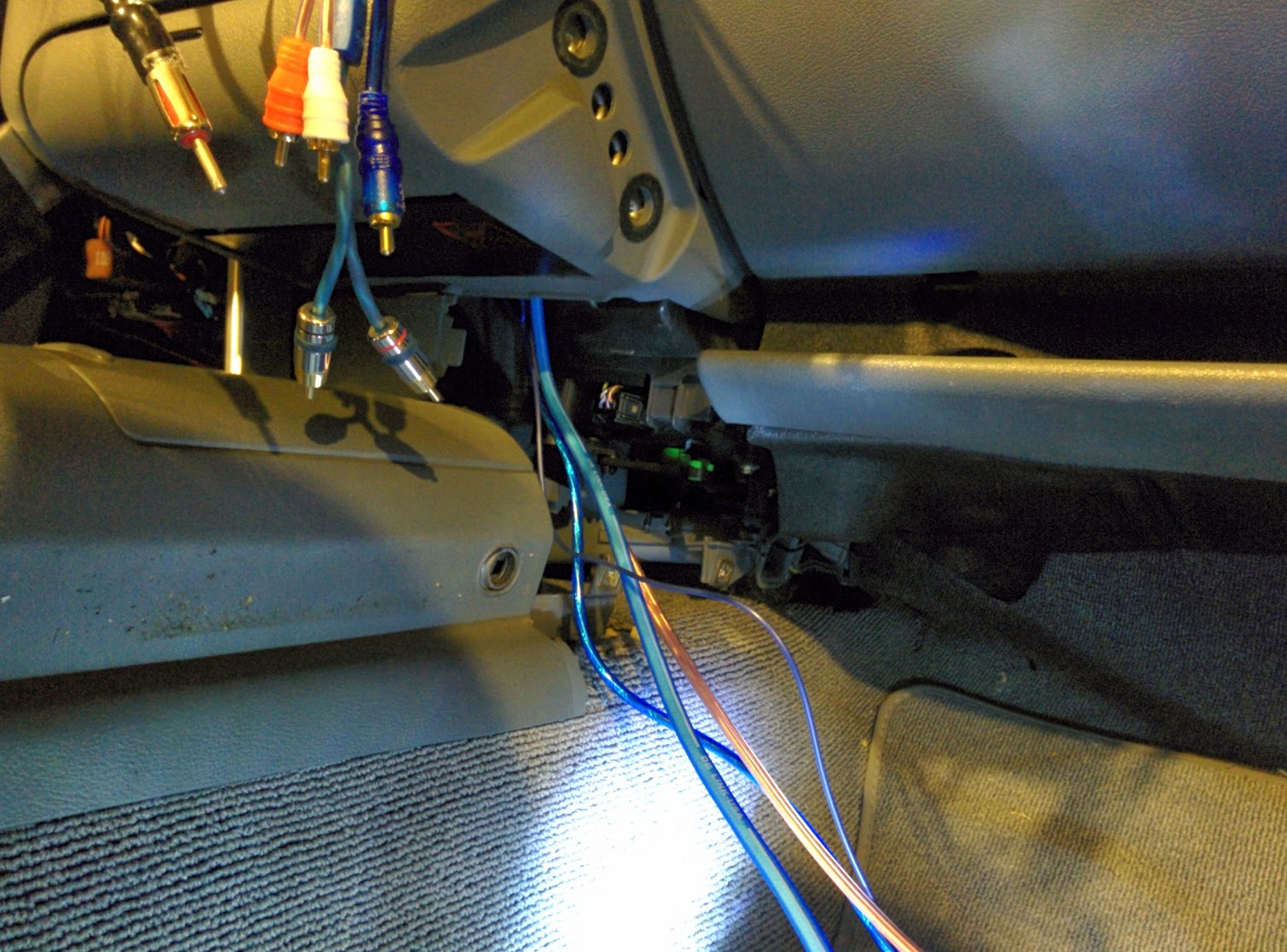
Project Audi TT Audio: Amp Power
March 29, 2014
I've installed amps in vehicles all of twice, and both of those cars were not German. One was a 1997 Dodge Intrepid , and one was a 2001 Mitsubishi Eclipse Spyder . The Intrepid was fairly easy because it was huge and had a lot of open spaces, so…
-

Introduction
March 29, 2014
I keep finding myself in situations where I say, "Yeah, I could totally do that myself." Honestly, I have no freaking idea what I'm doing, but at least I can share the knowledge after I've broken everything. You may also find instances…
-
GCouchbase - A reasonable Couchbase library for Vala
January 2, 2014
I'm pleased to announce that there is a reasonable Couchbase library coming along for Vala, and it is semi-functional at this point. Sure, an announcement seems weird at "semi-functional", but considering the absence of a library up to…
-
I'm speaking at Twin Cities Code Camp 15!
October 8, 2013
I will be presenting the Ambition MVC Framework at TCCC15. Twin Cities Code Camp is a free event that occurs twice a year at the University of Minnesota in Minneapolis, MN, and it caters to novice to advanced developers using multiple languages and…
-
Welcome Back
August 22, 2013
After some thought and paging through many years of old, outdated technical advice, I have migrated my blog to a new domain with a bit of a fresh start. Because I never want to let go of what I've said in the past, I kept a few entries around for…
-
Adventures in Vala: Ambition Framework
July 18, 2012
Quite some time ago, I posted about my Adventures in Objective-C , postulating that people would be willing to rapidly develop in a static-typed language if the language was easy to deal with. I created the foundation of a web framework that didn't…
-
Detecting scrolls in an Android ScrollView widget
May 31, 2011
So, Android. You would think that Google would have an event available for when someone scrolls a ScrollView widget. After all, it's the basic way to make some view scroll. Even better, there is an event for the AbsListView and other scrollable…
-
Lifecycle of an Android Application
April 20, 2011
Every time I get a new gadget, something possesses me to try to write an application for it. It's happened with dang near everything since the Newton, yet only a few gadgets have ever had a finished project. I tried the hardest on Symbian, but never…
-
Fun facts for hard times
April 9, 2011
When developing for Android, the default button height is 48 dip.
-
MooseX::Declare, TextMate, and TmCodeBrowser
February 18, 2010
Do you use TextMate ? Do you use TmCodeBrowser ? Do you use MooseX::Declare ? Must be a pain that nothing shows up the side pane when you start using it. It was for me. Open '~/Library/Application…
-
Happy 25th Anniversary, Macintosh.
January 25, 2009
Twenty-five years ago today, January 24th, 1984, Apple offered the first Macintosh for sale to the public. Released with a huge amount of fanfare using arguably the first high-budget "Super Bowl Ad" during Super Bowl XVIII on January 22nd,…
-
For some reason, this amused me
August 1, 2007
This amused me. :) Because you can't tell a great hacker except by working with him, hackers themselves can't tell how good they are. This is true to a degree in most fields. I've found that people who are great at something are not so much…
-
Rest in Peace, Mr. Butterfield
July 1, 2007
Jim Butterfield died last night at 1:30 in the morning, from complications from cancer. He inspired many a geek who hacked their way through Commodore 64's in the old days. He certainly helped me explore the inner workings of computers, and he will…
-
The Comeback of a Language
June 22, 2007
Not sure what was going on with me this morning, but I think I was trying to pick a fight in #catalyst this morning. I was at work all of about ten minutes before I asked a simple question, amounting to: "Are there any plans to bring Catalyst…